| 产品特性:遥操作 | 是否进口:否 |
具备速度控制模式和空间位移控制模式,即使用6维力反馈设备按照速度控制模式和空间匹配模式控制机器人运动;机器人运动控制和力反馈输出流畅,无卡顿感;能够通过规划完成主手带速启动问题,1s内实现柔顺启动并完成精准机器人位置跟踪。通过判断机器人运动状态实现断线重连及自动复位功能,提供自定义设置虚拟墙保护,避免发生不必要环境接触。提供Windows和Linux系统的软件开放源代码,其中Window系统的开发环境为Visual Studio 2013及以上。
软件构成
1.通用机器人控制器软件:
控制系统上位机软件,用于机器人启动连接、参数配置及运动控制等,主要功能如下:
1) 机器人的启动连接使能,通过与机器人控制器建立连接,启动机器人控制程序,完成机器人使能,通过点击切换轴、基座、工件、工具坐标系,完成对应基本示教运动,模型及数据显示;
2) 示教语言编程及应用,使用lua或c语言进行编程,并启动控制机器人,可配置末端工具及示教存点;
3) 根据不同的机器人类型进行参数配置,包括运动学、总线及末端参数等;
4) 对机器人运动学及动力学参数进行标定辨识;
5) 对机器人设备进行状态监控等。
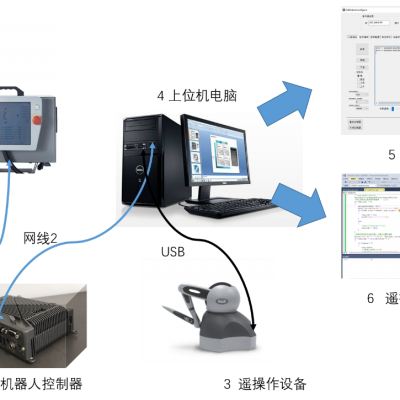
2 遥操作设备软件
1)通过touch smartsetup软件可实现遥操作设备的初始化及参数配置,获取手柄位姿及夹爪状态;
2)提供仿真笛卡尔空间及夹爪运动并提供力反馈;
3)vs环境实现机器人遥操作及力反馈功能。